

B
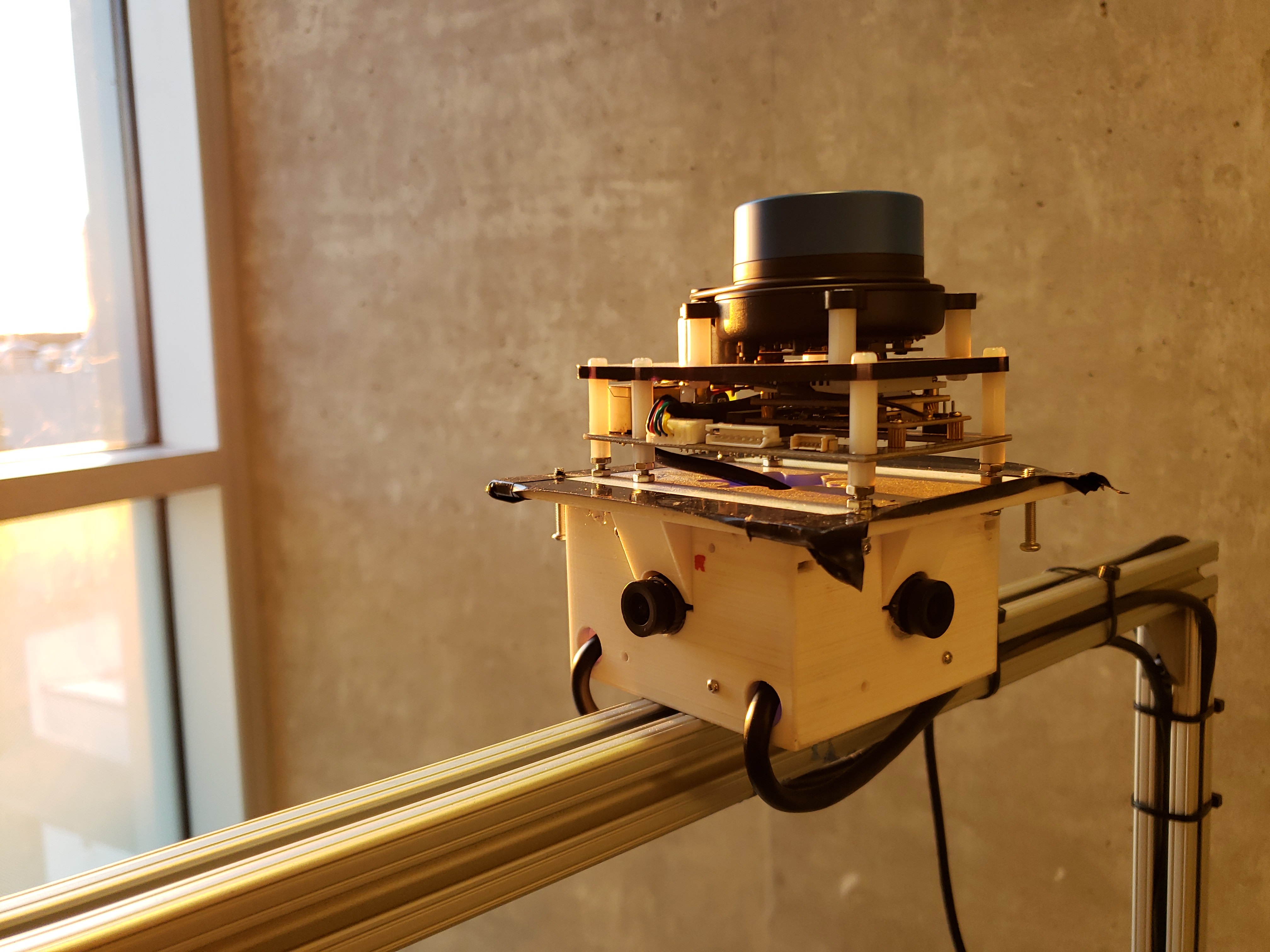
oxer is an autonomous robotic platform very similar to a conventional vehicle due to its ackerman steering design, and independent suspension. The project initially started as a platform to move material from one building to another but has since been repurposed as a test platform for new research performed at Linlab at Ontario Tech University.At only 1.2 m x 0.8 m (46” x 30”), the platform can be both an indoor and outdoor vehicle. It boasts a sensor suite that will enable autonomy in the near future. These include, 6 cameras, four of which are assembled together with a 2D lidar in a craftly-named package called the lighthouse. There are also 8 ultrasonics, an inertial measurement unit (IMU), a GPS module and many more. A 2.35kWh battery pack has also been designed internally to power the vehicle.

With its 4 independent wheels, it can comfortably hold as much as an average human being (75 kg). Four independent wheels also allow for 3 different drive configurations, front wheel, rear wheel and all-wheel drive.
Due to space restrictions, hub motors were used and in doing so, a Five-link suspension design was implemented on both the front and rear wheels to ensure proper handling.
I am no longer part of this beautiful project but have since moved on to something even more exciting (Reindeere Robotics).